※記事内に商品プロモーションを含む場合があります
秋月で400円で売っている小型サーボSG90。
普通のモーターをArduinoで制御しようとすると
モータードライバなどの回路が別に必要になります。
サーボを改造すれば電源と信号線1つで前進・後進出来るので
場所も取らず良いです。
小型サーボSG90の改造方法
やる事は2つ
- ファイナルギアの加工
- ポテンショメーターの固定化
ファイナルギアの加工
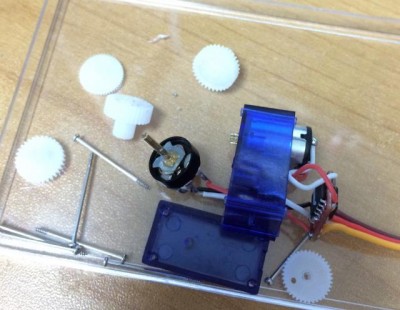
まずは4つのネジを外してバラします。
サーボの外に飛び出しているファイナルギアはポテンショメーターに
固定されているので取り外します。
バラバラです。
ここからは加工を行います。
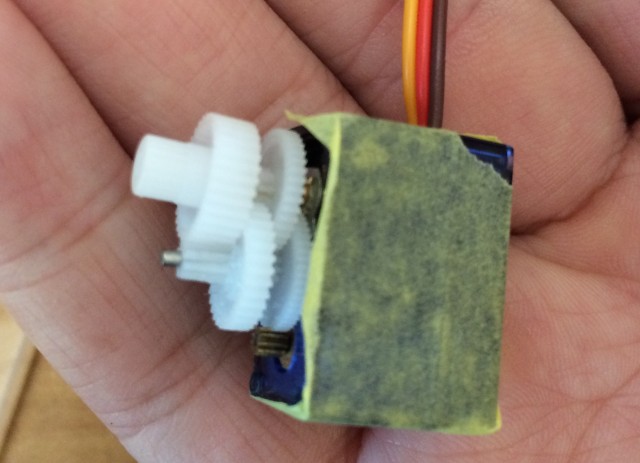
ファイナルギアの裏側にある突起を取ります。
バリなどもキレイに取っておきましょう。
次に軸部分の拡張。
このままだとポテンショメーターにピッタリなのでファイナルギアが
空転しません。
1.4mmのドリルで拡張しましたが、かなりきついので
1.5mmぐらいの方が良いのかもしれません。
軸の拡張を行いポテンショメータの軸に挿して
空転する様ならファイナルギアの改造は終わりです。
ポテンショメーターの固定化
ポテンショメーターを90度に固定する事で
角度を90度に指定すると停止、90度以下は前進、90度以上は後進
と言った動作ができます。
その為にはポテンショメーターを固定する必要があります。
方法は2つ
- ポテンショメーターを固定抵抗に置き換え
- ポテンショメーターを接着剤などで固定
1回目は元の状態で90度にしてから開けましたが
ファイナルギアがポテンショメーターにくっついていて動いてしまったので
今回は固定抵抗にしました。
写真では1KΩを使用していますが、2.2KΩの抵抗を使用します。
【参考】 サーボを連続回転させる
実際1KΩでも動きました。
抵抗をこんな感じにします。

これをこんな感じに半田付けします。
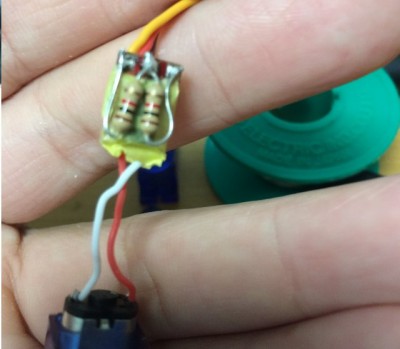
基板に直接半田付けした方はが場所を取りません。
ショート防止の為マスキングテープを貼っています。
ポテンショメーターは軸として必要なのでリード線を切って
元に戻しました。
あとは元通り組み上げれば完成ですが
再度グリスをギアに塗っておきましょう。
あとがき
音は結構うるさいです。
また、熱もそれなりに出るので本当の連続は難しいでしょう。
消費電流は2つで600mAぐらいでした。